















Formation KUKA compatible avec les robots :
KR 1000 TITAN / KR 360 FORTEC / KR 500 FORTEC / KR 600 FORTEC / KR QUANTEC / Nano QUANTEC / Press QUANTEC / PA QUANTEC / KR 700 PA / KR 40 PA / KR IONTEC KR 20 R3100 & KR 30 R2100 & KR 50 R2100 & KR 50 R2500/ KR CYBERTEC KR 8 R2010-2 & KR 12 R1810-2 & KR 16 R1610-2 & KR 16 R2010-2 & KR 20 R1810-2 / KR CYBERTEC Nano : KR 6 R1840-2 & KR 6 R1820 & KR 8 R1640-2 & KR 8 R1620/ KR 3 D1200 HM / KR 3 R540 / KR 4 R600 / DCARA : KR 6 R500 Z200 & KR 6 R700 Z200 / AGILUS KR 6 R700-2 & KR 6 R900-2 / LBR iiwa 7 R800 / LBR iiwa 7 R800 CR / LBR iiwa 14 R820 / ARC KR 8 R1420 & KR 8 R1440-2 & KR 8 R1620 / ARC KR 8 R2100 / KR 40 PA
Matériel : • PC équipé du logiciel KUKA-Sim
PROGRAMME
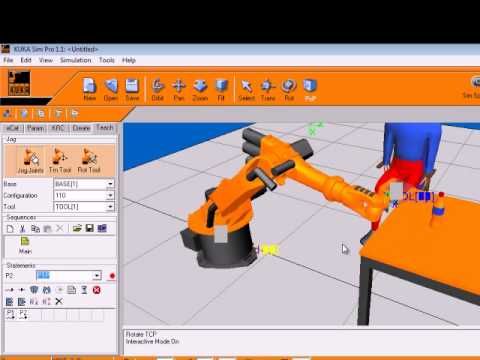
- Découverte du logiciel KUKA SIM
- Présentation du e-catalogue
- Présentation de la fenêtre 3D
- Création d’une cellule robotisée
- Positionner, connecter un objet
- Propriété d’un objet
- Création d’une trajectoire
- Positionner des repères outils et bases
- Programmer et tester une trajectoire
- Utilisation de While, IF et Sous-Programme
- Fonction détection de collision, échange de robot, visualisation d’une trace,
génération de plan - Fonction Gripper
- Echange de signaux entre le robot et les objets
- Importation et séparation de composants
- Organisation du Cell-Graph (objet composant la cellule)
- Composition d’une cinématique (animer les objets)
- Présentation du Safe Operation
- Création d’un PDF 3D ou d’une vidéo
- Connexion avec OfficeLite
- Transfert vers un vrai robot
RAPPEL SUR KUKA KR C4
Le contrôleur KR C4 de KUKA est le pionnier de l’automatisation d’aujourd’hui et de demain. Il fait baisser les coûts d’intégration, de maintenance et d’entretien. Simultanément, l’efficacité et la flexibilité des systèmes augmentent durablement, grâce à des standards industriels ouverts.
Le KR C4 intègre dans son architecture logicielle un contrôleur robot, un contrôleur API, un contrôleur de déplacement (par exemple KUKA.CNC) et un contrôleur de sécurité. Tous les contrôleurs partagent une base de données et une infrastructure commune. L’automatisation devient ainsi plus simple et plus performante, aujourd’hui et à l’avenir.
