















🔐 1. Introduction & sécurité
-
Consignes de sécurité en environnement virtuel
-
Principes d’utilisation de RoboGuide en simulation off-line
-
Présentation des différentes versions (HandlingPRO, PaintPRO…)
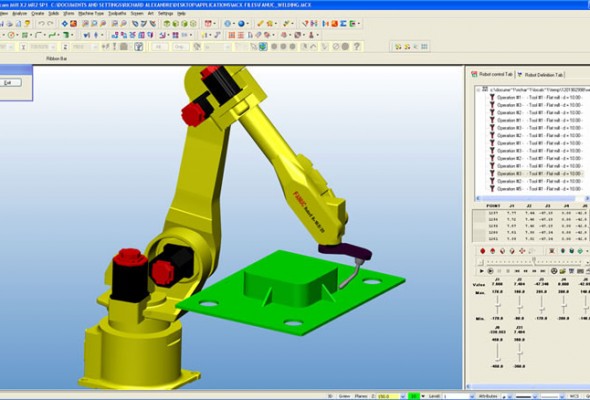
🧭 2. Prise en main du logiciel FANUC ROBOGUIDE
-
Navigation dans l’interface : fenêtres, menus, icônes
-
Outils de visualisation 3D (zoom, rotation, translation, repères)
-
Touches de raccourcis et fonctions contextuelles
🏗️ 3. Création d’une cellule robotisée
-
Choix et insertion d’un modèle de robot FANUC
-
Ajout d’éléments : convoyeur, table, pièce, outil
-
Positionnement des composants dans la scène
-
Détection de collision, volumes de sécurité, obstacles
🛠️ 4. Programmation via l’émulation Teach Pendant
-
Accès à l’environnement TPE depuis RoboGuide
-
Création et édition d’un programme robot
-
Affectation d’un repère outil / repère utilisateur
-
Intégration des E/S et des actions logiques (Pick, Place…)
🎯 5. Simulation du cycle robotisé
-
Lancement et suivi du programme en mode simulation
-
Observation de la trajectoire, vitesses, orientation outil
-
Optimisation des mouvements et vérification des zones d’accès
-
Calcul et analyse du temps de cycle automatique
💾 6. Sauvegarde & transfert vers cellule réelle
-
Sauvegarde du projet RoboGuide
-
Export de programmes au format FANUC (TP, VR, LS…)
-
Méthodes de transfert sur robot réel (USB, Ethernet…)
-
Bonnes pratiques d’archivage et de versioning
🧪 Travaux pratiques (70 % du temps)
-
Création complète d’une cellule robotisée
-
Simulation d’un scénario Pick and Place
-
Programmation d’un cycle simple avec obstacles
-
Détection de collisions et test de zones de sécurité
-
Sauvegarde, export et import de programmes
